
■主な仕様■
| マイコン | ・PIC16F628A (4MHz) |
| サーボモータ | ・HSR8498HB?(ロボザック用サーボ) 4個 (足2ピッチ軸×2) ・SG5010(TowerPro)4個 (股関節ロール軸×2、腕×2) |
| 電源 | ・単三型Ni-MH充電池(セリア)5本、6V |
| 通信 | ・シリアル通信 4800bps |
| 制御ソフト | ・自作モーション作成ソフト(VisualC#2005) |
|
|
|
|
|
|
■主な仕様■
|
|
■概要■ とにかく低予算で二足歩行っぽく動くものを作ってみようとやってみました。 二足歩行ロボットには興味があったのですが、組み立てキットでもそれなりに高価で、コントロールボードだけでもそれなりの値段がするので諦めかけていたのですが、プチロボXというのをネットで見かけて調べていくうちに、これなら自作で何とかできるのではないかと思い作り始めました。 最初は制御用マイコンとしてPIC16F84Aで作っていたのですが、やはりUSARTが無いと厳しくなってきたので一時期放置していたのですが、秋月のPICライタをVer.4にアップグレードしたので、プチロボXでも使われているらしい(未確認) PIC16F628Aに変更しました。 足の部分はほとんどがロボザックのパーツで、不足部分を付け加えた感じです。 今のところ摺り足歩行がやっとです。 腕はほんの飾り程度です。 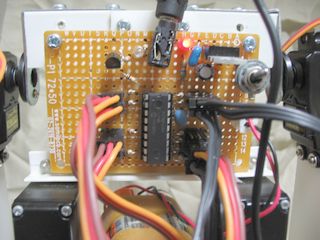 制御基盤 パソコンとはRS232CのD-subからイヤホンジャックに変換して制御基盤と繋ぎます。 |
 PIC16F84A使用 サーボモーター 簡易動作テスター |