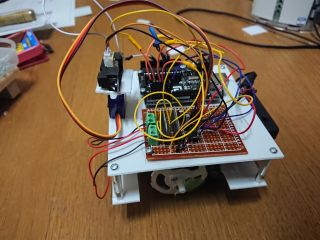
■主な仕様■
| マイコン | ・Arduino UNO(互換機) |
| ギヤボックス | ・タミヤ |
| サーボモータ | ・MicroServo SG90 |
| 電源 | ・単三型Ni-MH充電池4本、4.8V(駆動用) ・006P角電池9V(マイコン、回路用) |
| センサー | ・測距モジュール |
|
|
|
|
|
|
■主な仕様■
|
|
■概要■ Arduino(互換機)を使った、センサーで壁を避けつつ走り回る車両を作りました。 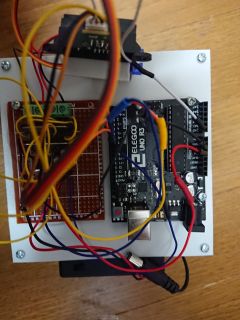 制御基盤 左がモータードライバ基盤、右がArduinoUNO(互換機)です。 |
 PIC16F84A使用 サーボモーター 簡易動作テスター |