|
|
|
|
|
|

| 
|
|
|
|
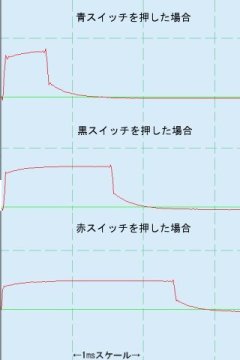
左の波形は1msスケールです。 出てきた波形は回路が適当なのもあってかあまりきれいではありませんが、目測で上から0.6ms、1.5ms、2.4msのパルス幅にだいたいなっていると思います(少し怪しいですが)。 |
|
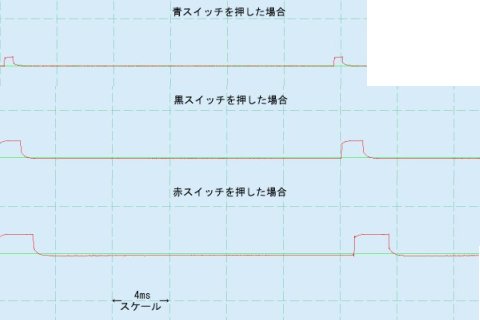
| こちらはスケールを4msに広げてパルスの間隔を測定しています。 プログラムが甘いのでパルス間隔はスイッチごとに異なります。目測で、青スイッチは23ms、黒スイッチは24ms、赤スイッチは25msの間隔でパルスが出ている事が分かります。 すべてのスイッチで間隔をほぼそろえる方法もありますが、それはまた別の機会に使う事にします。つまり手抜き…。 |

| 
|
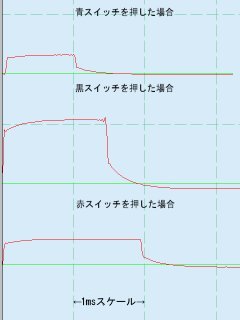
| 上から1ms強、1.5ms、2ms弱のパルスが出ているのが確認できました。 |
 NSKRX001(試作機) |  ラジコンカー (書きかけ) |